欢迎访问杏彩体育-杏彩体育投注网官网!

智能车又称为无人驾驶汽车,属于轮式移动机器人的一种,是一个集环境感知、路径规划、自动驾驶等多功能于一体的综合系统。智能汽车技术将许多领域联系在一起,如计算机科学、人工智能、图像处理、模式识别和控制理论等。智能汽车与一般所说的自动驾驶有所不同,它更多指的是利用GPS 和智能公路技术实现的汽车自动驾驶。这种汽车不需要人去驾驶,因为它装有相当于人的“眼睛”、“大脑”和“脚”的电视摄像机、电子计算机和自动操纵系统之类的装置,这些置都装有非常复杂的电脑程序,所以这种汽车能和人一样会“思考”、“判断”、“行走”,可以自动启动、加速、刹车,可以自动绕过地面障碍物在复杂多变的情况下,能随机应变,自动选择最佳方案,指挥汽车正常、顺利地行驶。
电路系统是智能汽车硬件系统的核心,对于本硬件电路系统而言,稳定性是需要优先保证的性能指标,毕竟跑完全程才是取得成绩的前提。在此基础上,还应当综合考虑智能汽车的动力性、重心及电路板的紧凑性等其他指标。
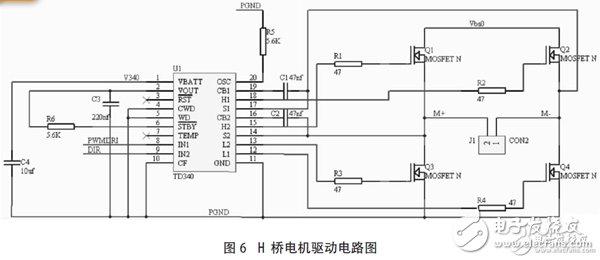
电机驱动模块为智能汽车的行驶提供动力,它的性能直接影响到后轮电机的控制性能,包括加速、减速与制动等性能。本文采用MOSFET 驱动芯片加全桥驱动方案,只需合理的选择MOSFET驱动芯片和功率MOSFET 以保证性能即可。电路图如图6 所示。
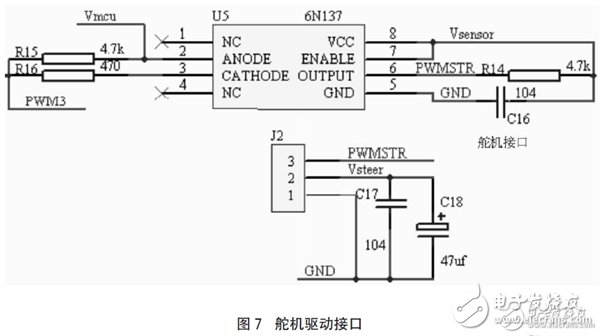
舵机负责智能汽车的转向,舵机模块能否稳定工作直接影响到智能汽车在赛道上高速行驶时的稳定性以及转向时的灵敏度和精确度。舵机工作原理为:舵盘角位由单片机发出的PWM 控制信号的脉宽决定,舵机内部电路通过反馈控制调节舵盘角位。由于自身即为角度闭环控制,而且性能较好,故系统中就不必考虑外加舵机闭环。舵机驱动模块电路如图7 所示。舵机驱动模块同样属于功率部分,用6N137光耦进行信号隔离。
智能车辆是一个涉及多领域的复杂的综合系统,要达到实用的目的,还要进一步深入下研究去,还有许多工作要做。在硬件上还需要解决因摄像头自身精度的差异或其因外部因素丢失数据导致影响智能车正常运行的问题,增强抗干扰能力;在软件上,还需要进一步优化算法,控制系统是智能汽车的核心内容,针对智能汽车的功能需求,对智能汽车控制系统关键模块进行了研究,设计的各模块被应用于“飞思卡尔”智能汽车中,文中各图对智能汽车的研究具有启发作用。
汽车收音机应用环境的特殊性对电路性能具有更高的要求,而射频电路的设计是实现高性能的关键。本文介绍了TDA7513的射频电路设计方法,根据实际设计经验提出了提高射频电路EMC特性和噪声特性的设计方法和措施,并指出了射频电路性能测试的注意要点。射频电路是收音机电路设计的重点和难点,如果射频电路设计不好,收音机的噪限灵敏度和信噪比以及技术指标都会大大下降,甚至只能手动收到很少的几个广播电台,自动搜索电台功能失效。从收音机天线端的广播信号场强来看,信号的动态范围非常大,尤其是汽车收音机所处的环境变化快而大。
收音机射频电路通常很难集成进IC 中,一般由分离元件组成前置低噪声放大器(LNA)和谐振带通滤波器。汽车收音机射频电路的作用从时域上看是要将微弱的广播信号放大,通过自动增益控制电路(AGC)为后级混频器提供稳定的载波信号强度;从频域上看,它要跟踪所选择的电台信号,滤除掉干扰信号如镜像频率(》60dB抑制)和本振频率,改善射频信号质量。
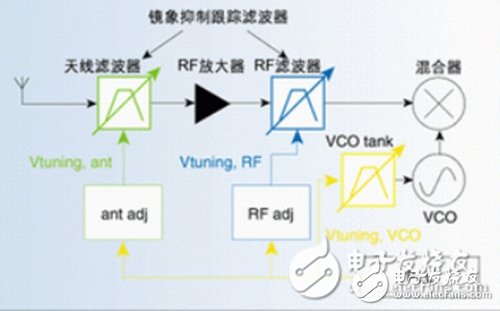
图1是我们设计的汽车收音机射频电路方框图,它由天线滤波器和射频低噪声放大器以及谐振带通滤波器组成。该款汽车收音机的设计目标是噪限灵敏度为 0dBu(30dB S/N)、音频信噪比64dB、自动搜索灵敏度小于10dBu,具有较强的抗邻频道干扰和干扰信号能力,实现MCU全自动调整功能。
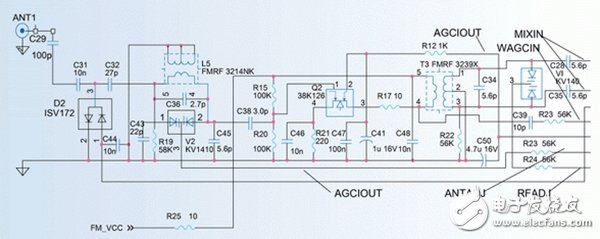
图2是汽车收音机TDA7513的FM收音机部分射频前端电原理图。C31、C32、D2(1SV172)、 C44组成调频波段天线是VHF~UHF频段天线信号衰减器,它是电流控制型元件,随着电流的增大其阻抗减小。它受控于后级 FM宽带AGC和窄带AGC合成产生的FMAGC电流,起控点为天线、C45组成天线MHz左右。该天线滤波器可以人工用无感调批调节射频线,也可以通过MCU调节变容二极管V2,从而实现自动调整功能。
Q2(3SK126)、C38、R15、R20、C46、R21、C47、C41、R17组成低噪声射频放大器,增益为30dB。本设计中选用N沟道场效应管3SK126作射频放大器具有输入阻抗高、增益高和噪声低的优点,而且是电压控制型器件,设计简单。Q2受控于后级FM宽带 AGC和窄带AGC合成产生的FMAGC电压,起控点为天线组成RF谐振带通滤波器,带宽为8MHz左右,T3为FM RF变压器。该带通滤波器同样可以人工用无感调批调节T3,也可以通过MCU自动调节变容二极管V1。接收机的接收极限是由接收机自身噪声性能决定的,所以在收音机的射频电路中要求尽量选用低噪声元件。
随着无线通信、信息传感技术的迅猛发展和日渐成熟, 通过信息传感微和网络将物品联接成物联网, 以实现物品的自动识别、定位、跟踪、继电器和管理为目标的服务已成为可能。现代汽车中的空调一般是利用手工进行控制的,空调只有等到司机进入驾驶室才能开启或关闭,这就使得在炎热的夏天或寒冷的冬天, 刚进入车内时由于空调没有开启,人会感觉到异常的燥热或寒冷,因此设计和制造出能监控车内温度并根据监测到的温度情况来进行提前远程控制开启车内空调系统的设备便提到人们日常生活的议事日程上来,本设计就是为满足这一要求而提出来的。
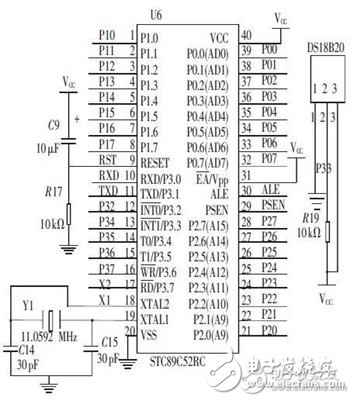
系统中的温度采集模块采用DALLAS 公司生产的高精度、高可靠性的DS18B20 温度传感器, 它具有体积小、硬件开销低、抗干扰能力强、精度高的特点, 采用单总线数据通信, 全数字温度转换及输出, 最高12 位分辨率,精度可达0.5℃, 检测温度范围为-55℃~+125℃, 因此它能满足本系统的设计要求。DS18B20 与微的连接电路见图2 所示。
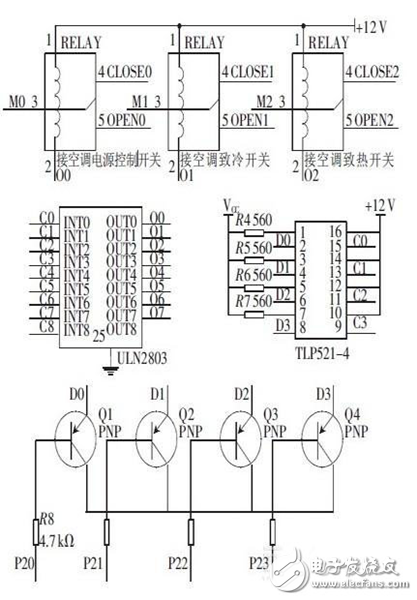
继电器开关模块由TLP521 -4 、ULN2803 和SRD -12VDC 及三极管构成, 由微输出的信号经过三极管构成的开关电路送往TLP521 -4 光耦芯片再通过ULN2803 达林顿管的放大后用来驱动SRD-12DC 继电器, 进而达到控制空调的各种开关的作用, 继电器开关控制模块与微的电路连接图如图3 所示。
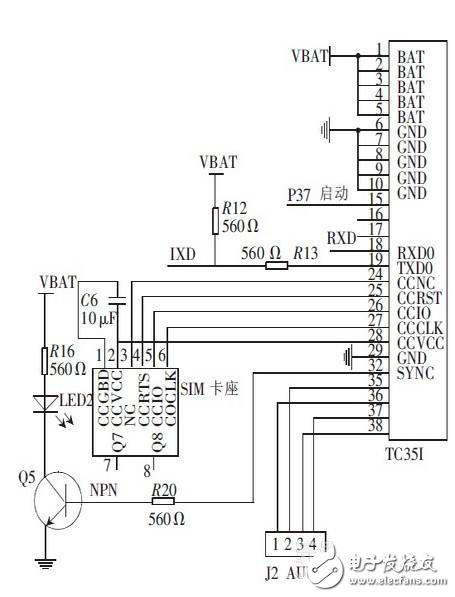
TC35I 模块是Simens 推出的一款双频900/1800 MHz高度集成的GSM 模块。它设计小巧、功耗很低, 可以为很多通信应用提供经济高效的解决方案。它支持EGS900 和GSM1800 双频, 数据传输的内容支持语音、数据、短消息和传真服务, 通信接口采用RS232( 指令和数据的双向传送),供电电源采用单电源3.3 V~5.5 V 的电压, 适用的范围包括: 便携电脑的低功耗通信设备、遥测遥感、远程信息处理和通信等工业领域。本系统中TC35I 与微的电路连接图如图4 所示。
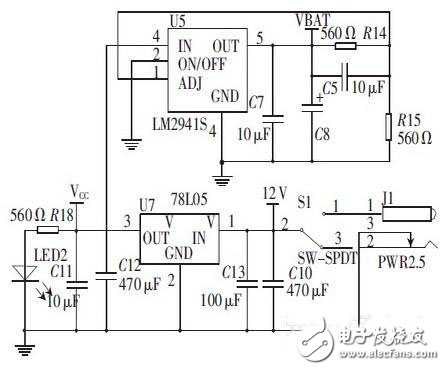
系统电源模块采用了LM78L05 和LM2941S 两将外部12 V 的直流供电电压转换为系统所需要的5 V和4.2 V 的电压, DS18B20连接电路图如图5 所示。
本文就是从物联网的角度出发提出一种以GSM 无线网络为基础, 通过温度传感器, 将用户手机、汽车空调组合成一个小型物联网的应用设计。专为基础的设备汽车空调温度控制系统设计方法, 经实际的制作和调试验证, 该系统能够稳定、可靠地运行, 该系统还具有扩展方便、无线传输距离远,可广泛应用于远距离控制领域。
汽车试验是发现汽车设计开发中各种问题的重要手段,依据试验结果能对汽车各种性能做出客观的评价。作为汽车工业的基础工程之一,汽车试验在汽车工业的整体发展中发挥了重要作用。汽车性能测试系统是汽车试验工程的关键组成部分,它是由若干相互联系、相互作用的传感器和仪器设备等元件,为实现对汽车各项性能的测试而组成的有机整体,汽车测试系统的性能往往对整个汽车试验的效用产生重要影响。
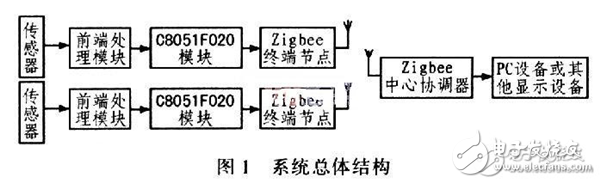
汽车试验主要包括动力性能、燃油经济性、操纵稳定性和排放特性等测试项目,主要性能参数有速度、加速度、燃油消耗量、温度以及操纵稳定性试验中的动态运动参数等,通过传感器得到的这些参数的测试信号,经过前端处理模块处理(整形、滤波、放大等) 后送入C805l-F020微处理器中,在单片机内部进行模数转换和数据处理后通过串口实现与Zigbee终端节点的连接,再由终端节点在WLAN中将数据发出,Zi-gbee中心节点接收到数据后经串口与上位机进行通讯。中心节点也可将上位机的命令发送给终端节点,控制终端节点执行。系统总体结构框图如图1所示。
传感器将各种常见的非电量信号转换为电量信号,一般都较微弱,前端处理模块将这些信号进行处理后送至单片机的A/D转换端口。本系统共有8路传感器信号,包括2路压变传感器信号、2路-5~+5 V电压信号、2路4~20 mA电流信号和2路热电偶信号的前端处理。其中压变传感器信号和热电偶信号前端处理硬件电路分别如图2和图3所示。
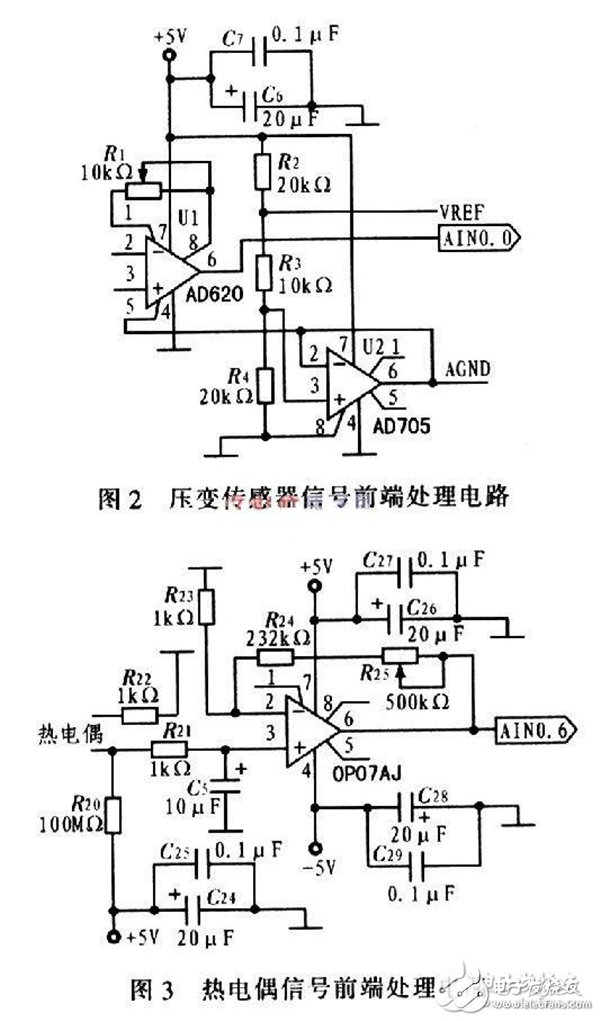
AD620是一款低成本、高精度仪表放大器,仅需1个外部电阻设置增益,增益范围为l~10 000。对压变传感器信号的前端处理采用AD62-0、AD705组成的放大电路,该部分采用单电源供电,AD705是电压跟随器,为AD620提供输出电压的零点。将VREF、AGND送至MCU的8位精度AD-Cl的AINl.0、AINl.1端口,利用软件程序实现该路信号的参考电压和模拟地的计算。热电偶传感器用来测量汽车关键部件温。
电话:0535-6534223 0535-6528589
钟克利:18615357956
唐伟华:18615357959
邮箱:hobbm@www.xgjx18.com
地址:山东省烟台市楚凤二街94号




